|
LCC Fusion Project 1.0
LCC Automation
|
|
LCC Fusion Project 1.0
LCC Automation
|
Provides monitoring and message output for serial, Bluetooth, and WebSerial. More...
#include <LccNodeSerialMonitor.h>
Inherits openlcb::Polling.
Public Member Functions | |
| LccNodeSerialMonitor (uint8_t monitorIntervalSec=1) | |
| Constructor. More... | |
| void | begin (const openlcb::NodeID nodeID, BluetoothSerial *serialBT) |
| Initialize the monitor with the node ID and BluetoothSerial instance. More... | |
| Polling * | polling () |
| Expose this object for integration with the OpenLCB polling loop. More... | |
| void | poll_33hz (openlcb::WriteHelper *helper, Notifiable *done) OVERRIDE |
| Poll callback (33Hz) - part of openlcb::Polling interface. More... | |
| void | sendColoredText (const char *text, const char *colorCode=BLACK_TEXT, bool crlf=true) |
| Send colored text using ANSI escape sequences. More... | |
| void | setEcho (bool state) |
| Enable or disable echo of received data back to source. More... | |
| void | processSerial () |
| Poll and process UART and Bluetooth data, routing accordingly. | |
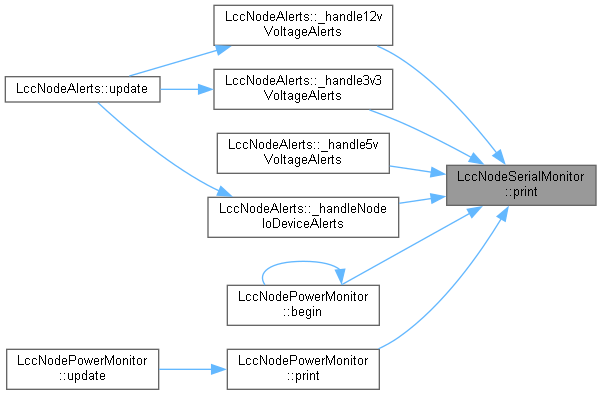
| void | print (const char *format,...) |
| Print a formatted message to all enabled outputs. More... | |
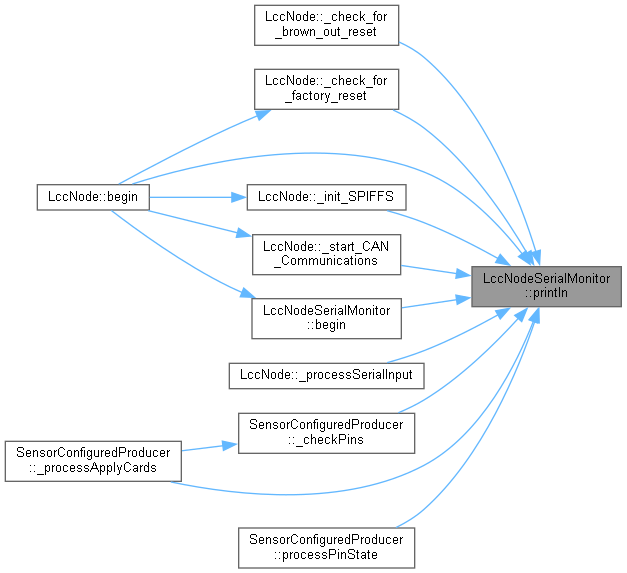
| void | println (const char *format,...) |
| Print a formatted message followed by CRLF to all enabled outputs. More... | |
| size_t | available () const |
| How many bytes are waiting to be read from the selected interface. More... | |
| int | read () |
| Read one character from whichever interface has data first. More... | |
| String | readLine (char terminator='\n', size_t maxLen=MAX_MESSAGE_SIZE) |
| Read until a terminator (default ' ') or maxLen, returning a trimmed Arduino String. More... | |
Private Member Functions | |
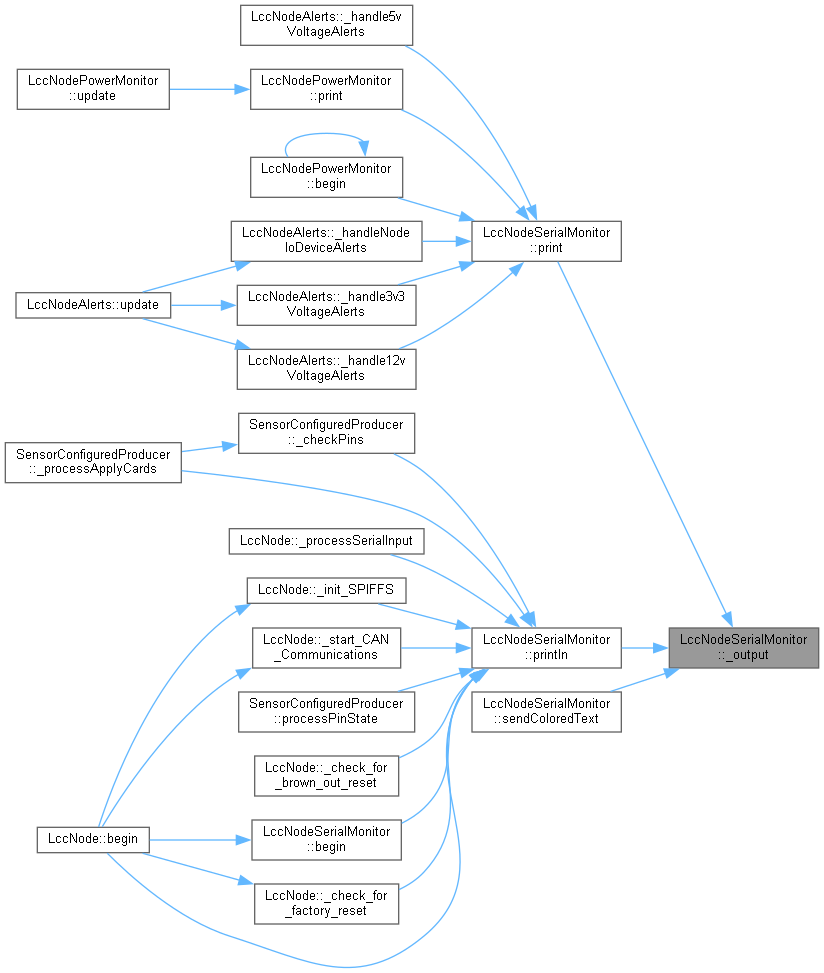
| void | _output (const char *msg) |
| Internal method to send or queue output to interfaces. More... | |
| void | _flushBt () |
| Flush queued Bluetooth messages when a client is connected. | |
Provides monitoring and message output for serial, Bluetooth, and WebSerial.
This class inherits from openlcb::Polling to integrate with the LCC event loop.
Definition at line 88 of file LccNodeSerialMonitor.h.
|
inline |
Constructor.
| monitorIntervalSec | Interval in seconds between polls |
Definition at line 106 of file LccNodeSerialMonitor.h.
|
inlineprivate |
Internal method to send or queue output to interfaces.
| msg | Null-terminated string to output |
Definition at line 332 of file LccNodeSerialMonitor.h.

|
inline |
How many bytes are waiting to be read from the selected interface.
Checks, in order:
Definition at line 259 of file LccNodeSerialMonitor.h.
|
inline |
Initialize the monitor with the node ID and BluetoothSerial instance.
| nodeID | Identifier for the LCC node (for BT device naming). |
| serialBT | Pointer to a BluetoothSerial object for SPP communication. |
Definition at line 114 of file LccNodeSerialMonitor.h.


|
inline |
Poll callback (33Hz) - part of openlcb::Polling interface.
| helper | Unused write helper |
| done | Notifiable to signal completion |
Definition at line 155 of file LccNodeSerialMonitor.h.
|
inline |
Expose this object for integration with the OpenLCB polling loop.
Definition at line 146 of file LccNodeSerialMonitor.h.
|
inline |
Print a formatted message to all enabled outputs.
| format | printf-style format string |
| ... | Arguments for format |
Definition at line 221 of file LccNodeSerialMonitor.h.

|
inline |
Print a formatted message followed by CRLF to all enabled outputs.
| format | printf-style format string |
| ... | Arguments for format |
Definition at line 236 of file LccNodeSerialMonitor.h.

|
inline |
Read one character from whichever interface has data first.
Call available() first to know there’s data waiting.
Definition at line 279 of file LccNodeSerialMonitor.h.

|
inline |
Read until a terminator (default '
') or maxLen, returning a trimmed Arduino String.
| terminator | character to stop at (not included in result) |
| maxLen | maximum number of characters to collect |
Definition at line 302 of file LccNodeSerialMonitor.h.


|
inline |
Send colored text using ANSI escape sequences.
| text | The text to send |
| colorCode | ANSI color code string (e.g. RED_TEXT) |
| crlf | Append CRLF if true |
Definition at line 165 of file LccNodeSerialMonitor.h.

|
inline |
Enable or disable echo of received data back to source.
| state | True to echo input, false to suppress |
Definition at line 175 of file LccNodeSerialMonitor.h.
